


Industrial Humanoid Robot



Introduction
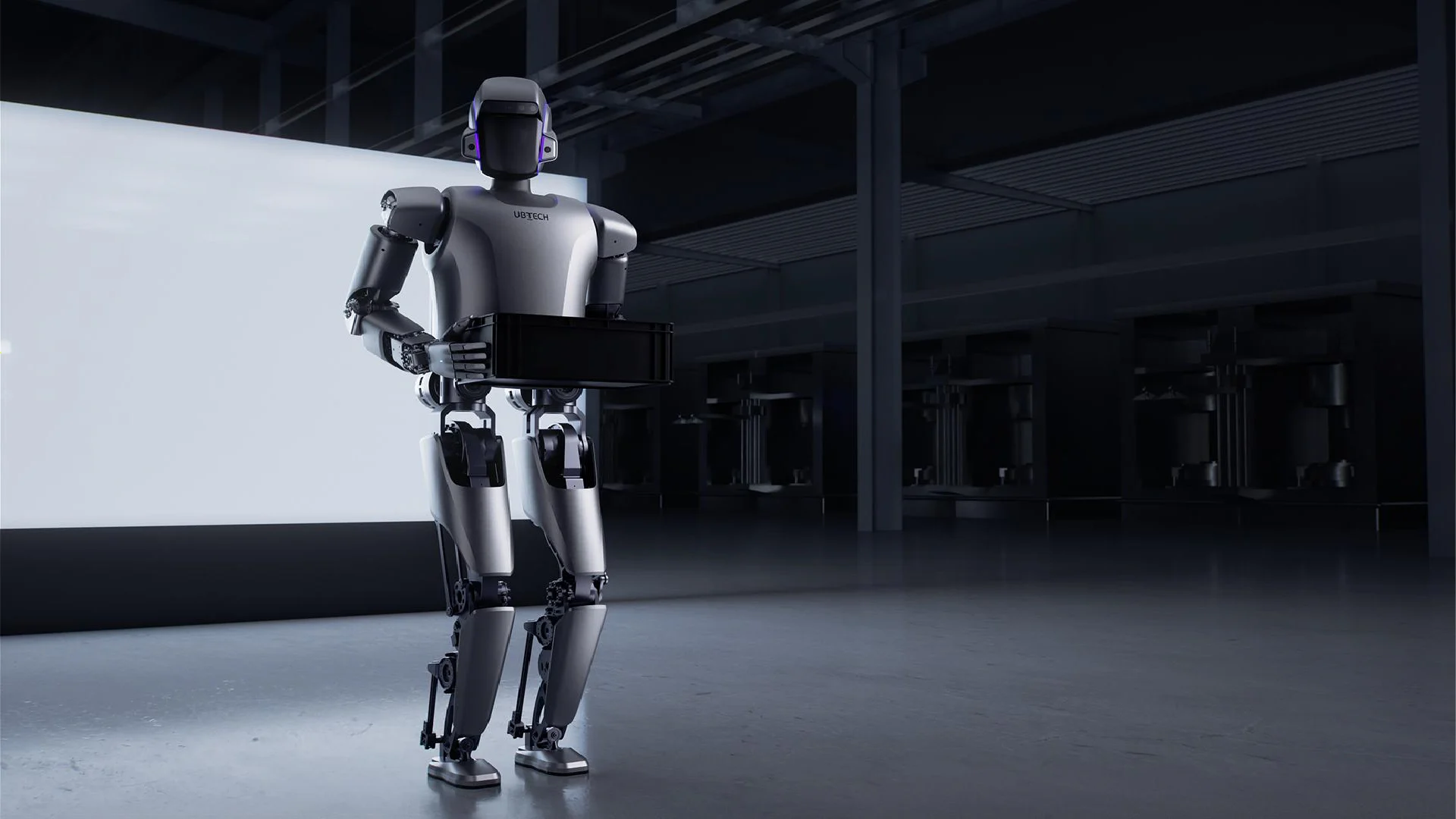
Industrial Humanoid Robot
Walker S1
Beyond Boundaries — Into Real-World Operations
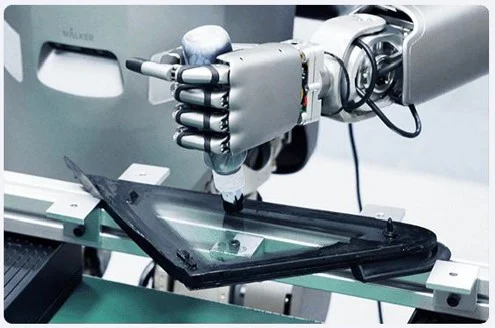
Powered by an intelligent “brain” and agile “motor control,” Walker S1 integrates multimodal large models, semantic VSLAM, and adaptive motion control. It is the ideal partner for handling 3K tasks in industrial environments.
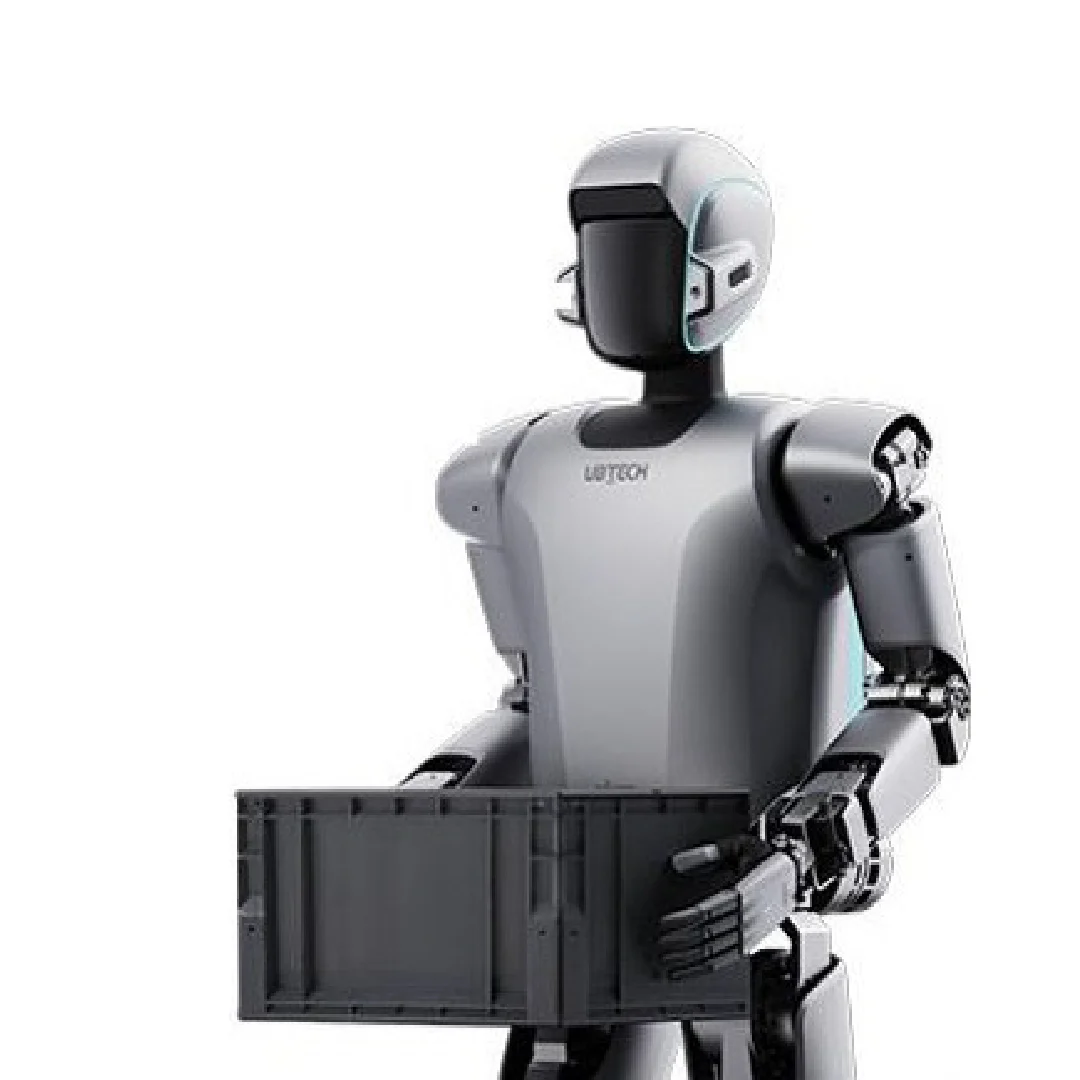
360° Multimodal Perception
- Integrated head design
- Dual fisheye cameras
- 3D stereo vision
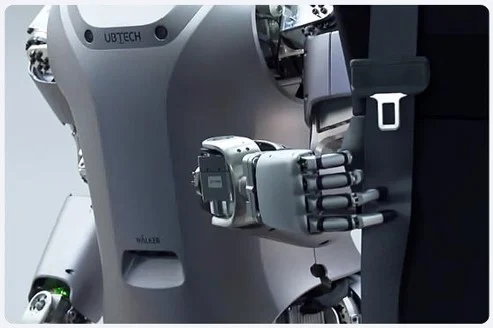
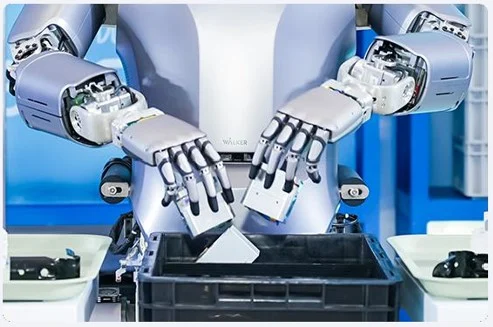
Dexterous Human-Like Hands
- Multi-tactile pressure sensing design
- Comprehensive library of dexterous manipulation strategies


ROSA 2.0 Robot Operating System Framework
- Tailored for industrial environments
- Flexible deployment and development across diverse scenarios
Integrated Joint Module
- Innovative rotary drive design
- Maximum torque of 250 N·m

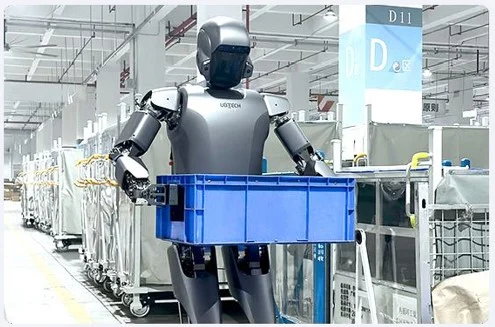
Supports General-Purpose Multimodal Large Models
Capable of recognizing and understanding target objects, enabling it to take appropriate actions and complete tasks autonomously.

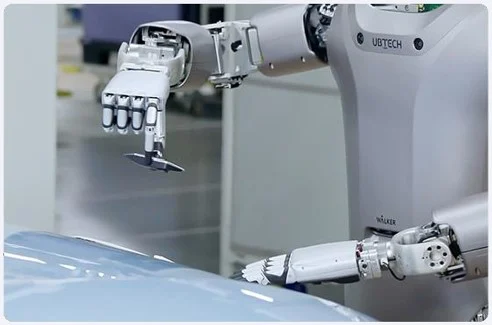
Application Scenarios

Product Specifications
| Model | Walker S1 |
|---|---|
| Height | 172 cm |
| Weight | ≤76 kg |
| Color | Tech Grey |
| Degrees of Freedom | 28 DOF (with non-end-effector hands) / 40 DOF (with dexterous hands) |
| Cameras | 4 × 100 MP fisheye cameras 4 × RGBD depth cameras |
| Sensors | 2 × high-precision posture sensors 4 × six-axis force–torque sensors |
| Endurance | Charging (10%–90%) < 1 hr; full charge ≤ 2 hrs |
| Materials | Aluminum alloy chassis, ABS exterior |
| Arm | Arm Reach: 205–225 mm |
| Running Speed | Up to 4 km/hr |
| Wireless Communication | WiFi + Bluetooth |
Download
