


Humanoid Robots


Humanoid Robots
ATOM
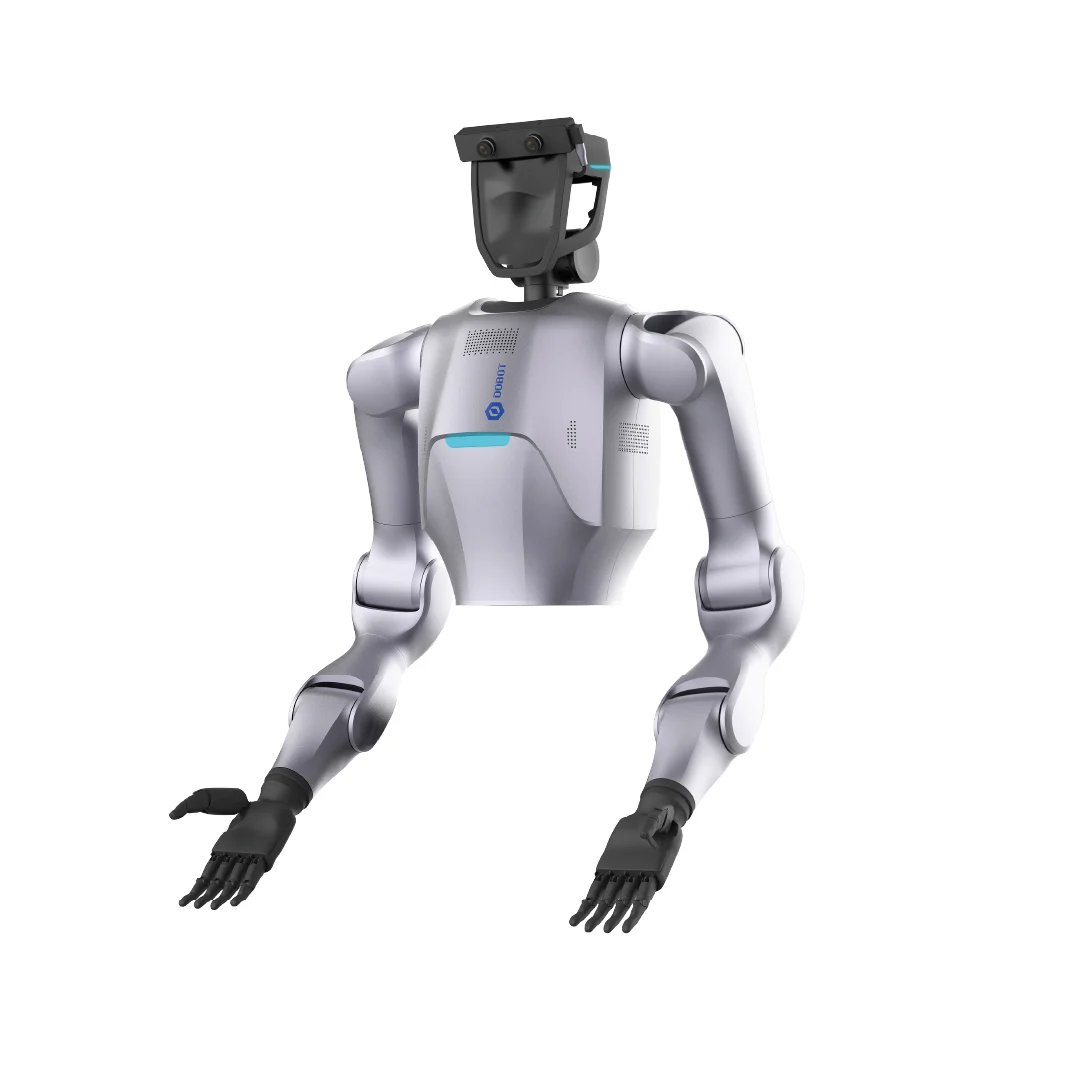
ATOM Humanoid Robot
ATOM is designed for diverse scenarios such as assembly and inspection on production lines, operation of multiple beverage machines, and pharmacy medication retrieval. It remains highly adaptable even when facing non-fixed equipment positions, varied product specifications, similar operational motions, and tight, fast-paced environments—making it well-suited for continuous industrial and commercial production workflows.

Full-Scale Bionic Design
ATOM stands 1.65 m tall, weighs 62 kg, and features 41 DOF with a 1:1 human-like arm structure. Its 7-axis industrial bionic arm offers ±0.05 mm repeatability, replicating human shoulder, elbow, and five-finger movements with precision. Designed for workbench tasks at 700–1000 mm height, ATOM is built to meet real industrial-environment requirements.
Neuro-Driven Dexterous Control
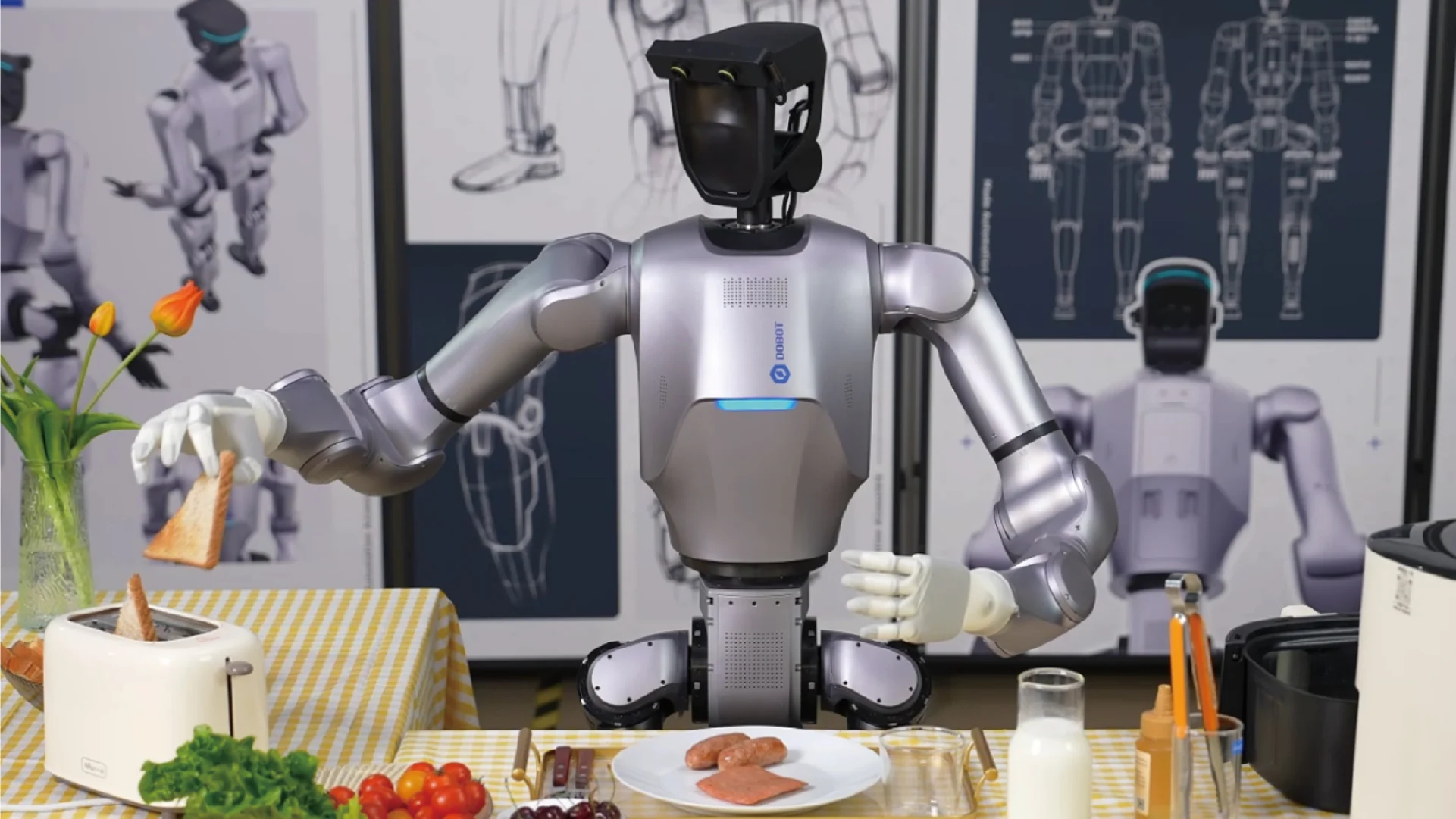
The Neuro-Driven Dexterity System (NDS) uses a Transformer-based model and binocular RGB vision to autonomously control up to 28 DOF in the upper limbs. With a closed-loop design combining visual perception and a five-finger dexterous hand, NDS offers servo-level vibration suppression and smooth 200 Hz high-frequency control.

Human-Like Straight-Leg Walking System
By combining human biomechanics, imitation learning, and reinforcement-learning neural networks trained on real human motion data, ATOM achieves highly human-like full-body movement.
Straight-leg walking reduces energy consumption by about 42% compared to traditional bent-knee gait, extending continuous operating time.
Advanced On-Device AI Computing
Equipped with an embodied-intelligence model and powerful 1500-TOPS edge computing, ATOM supports on-device data collection, training, and inference. With dedicated development tools and training resources, users can rapidly deploy models in diverse environments, achieving data-driven embodied intelligence without heavy pre-programming.
Three Models to Choose From
ATOM Max — Flagship Model
ATOM Max increases total body degrees of freedom to 41 DOF and features 12-DOF dexterous hands, ideal for advanced developers as well as commercial and industrial applications. It offers full development support and maximum capability.
ATOM Trainer — Training Model
ATOM Trainer provides ready-to-deploy embodied-intelligence training models, supporting task expansion and transfer learning to accelerate application development.
ATOM D — Data Collection Model
ATOM D is designed for large-scale data acquisition, equipped with a 7-DOF arm and 2-DOF head, and supports multiple end-effectors such as dexterous hands and grippers.
Product Specifications
| Model | ATOM MAX (Flagship) | ATOM Trainer | ATOM D (Data Collection) |
|---|---|---|---|
| Height | Approx. 1650 mm | Approx. 1650 mm | Approx. 1650 mm |
| Weight (without hands/grippers) | Approx. 62 Kg | Approx. 62 Kg | Approx. 62 Kg |
| Body DOF (without hands/grippers) | 29 | 29 | 16 |
| Head DOF | 2 | 2 | 2 |
| Arm DOF (per arm, without hand/gripper) | 7 | 7 | 7 |
| Waist DOF | 1 | 1 | 0 |
| Leg DOF (per leg) | 6 | 6 | 0 |
| Arm Reach (without hands/grippers) | 600 mm | 600 mm | 600 mm |
| Arm Weight (without hands/grippers, per arm) | Approx. 6.5 kg | Approx. 6.5 kg | Approx. 6.5 kg |
| Arm Payload (without hands/grippers, per arm) | 3.5 kg | 3.5 kg | 3.5 kg |
| Arm Repeatability | ±0.05 mm | ±0.05 mm | ±0.05 mm |
| Max Arm End Speed | 1.5 m/s | 1.5 m/s | 1.5 m/s |
| Audio Equipment | 360° omnidirectional mic ×1 High-sensitivity mic ×2 | 360° omnidirectional mic ×1 High-sensitivity mic ×2 | — |
| Max Walking Speed | 1.5 m/s | 1.5 m/s | — |
| Full-Body Kinematic Chain | Yes | Yes | Yes |
| Processor | intel 5 | intel 5 | intel 5 |
| High-Performance Computing Module | Intel i9 (24 cores / 32 threads) High-capacity discrete GPU (FP32 computing power: 41.15 TFLOPS) | Intel i9 (24 cores / 32 threads) High-capacity discrete GPU (FP32 computing power: 41.15 TFLOPS) | Intel i9 (24 cores / 32 threads) High-capacity discrete GPU (FP32 computing power: 41.15 TFLOPS) |
| Endurance | Approx. 2 h | Approx. 2 h | — |
| Charging Time | Approx. 1 h | Approx. 1 h | External power supply |
| End-Effectors | Two 6-DOF dexterous hands | 0 | 0 |
| Head Sensors | Depth camera ×1 HD stereo camera ×1 | Depth camera ×1 HD stereo camera ×1 | Depth camera ×1 HD stereo camera ×1 |
| Arm Sensors | Depth camera ×2 | Depth camera ×2 | — |
| Waist Sensors | Depth camera ×2 | Depth camera ×2 | — |
| Head 3D Sensor | 3D structured-light sensor ×1 | 3D structured-light sensor ×1 | — |
| Function Expansion | Supported | Supported | Supported |
